Individual Thesis
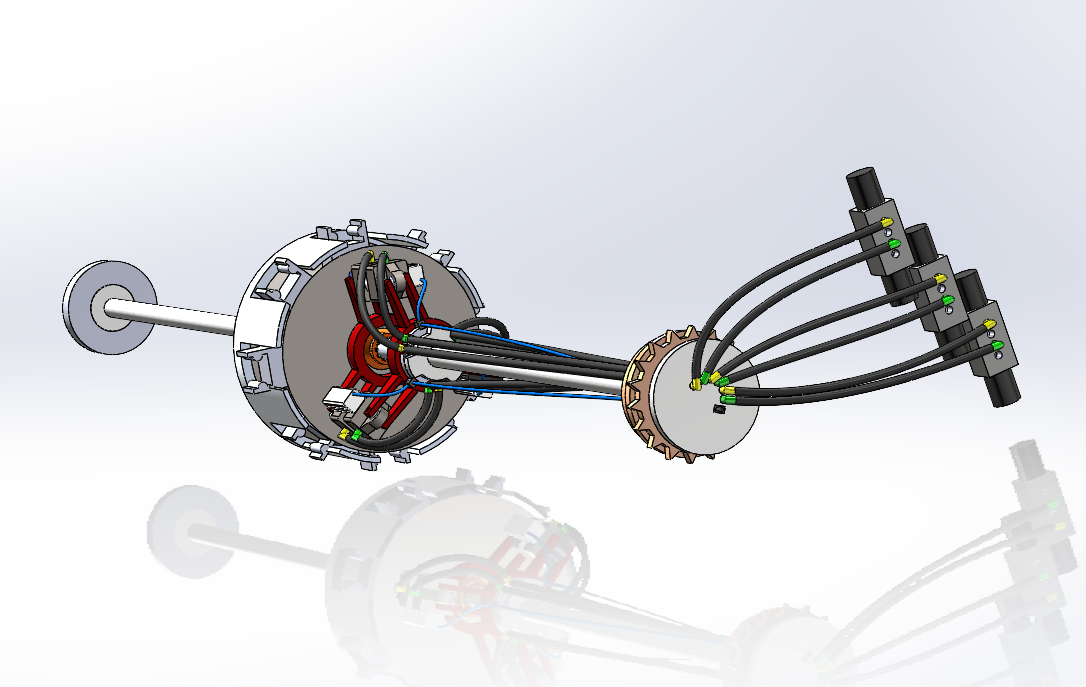
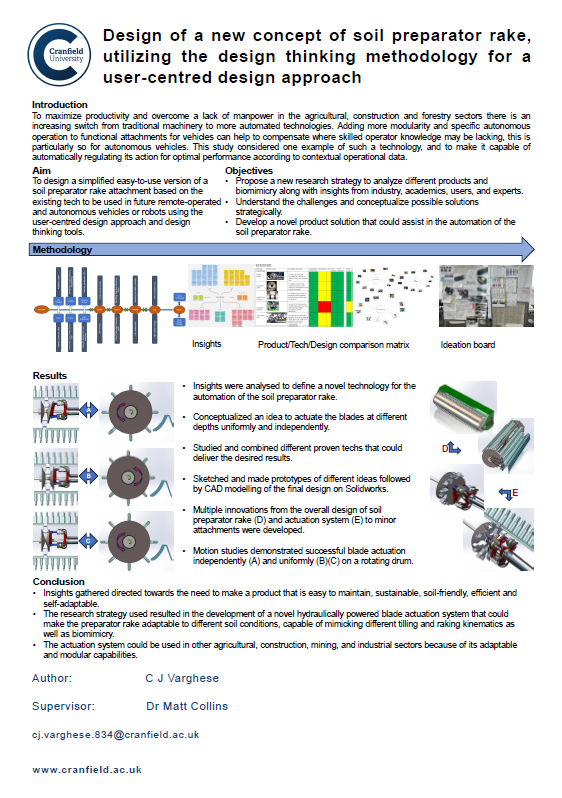
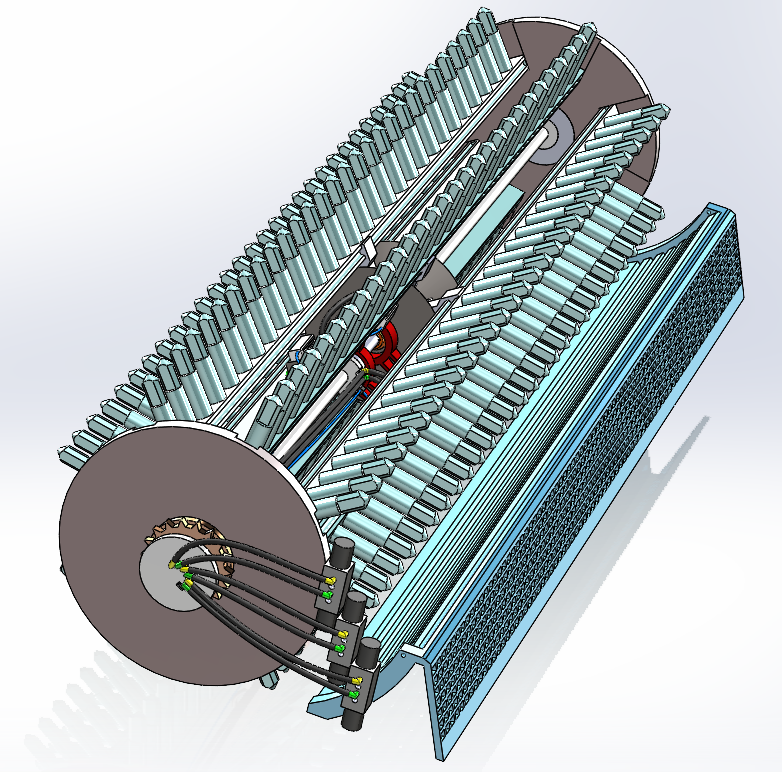
A study into the creation of a unique hydraulically actuated mechanism for a new concept of soil preparator attachment. Capable of actuating 300 blades independently on a rotating drum, allowing it to achieve continuously variable blade depth control, mimic different raking and tilling kinematics for different soil conditions, and perform biomimicry and rock separation. This study demonstrates a structured approach to the development of this new technology through a combination of first-hand user insights gathered from academics, users and industry experts, a study of biomimicry, and a systematic assessment of state-of-the-art technologies, from agricultural and construction equipment to technology used in the automotive and aerospace sectors. These technologies were assessed through a novel technology matrix, which provided a quantitative method for scoring across a range of criteria and systematic down selection. This novel technology is ultimately intended for use with remote-operated and autonomous vehicles.
Currently in the sketching, motion study (Solidworks), and low-fidelity prototype phases. The final product is to be completed soon. Designing the actuation mechanism to be used in other areas of agricultural, mining, and construction applications.

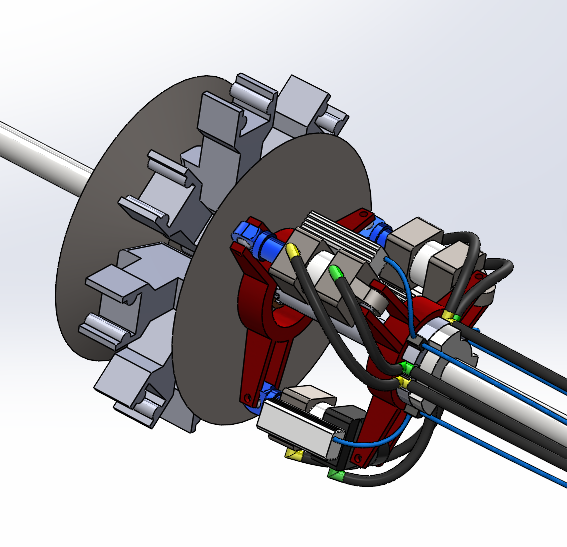
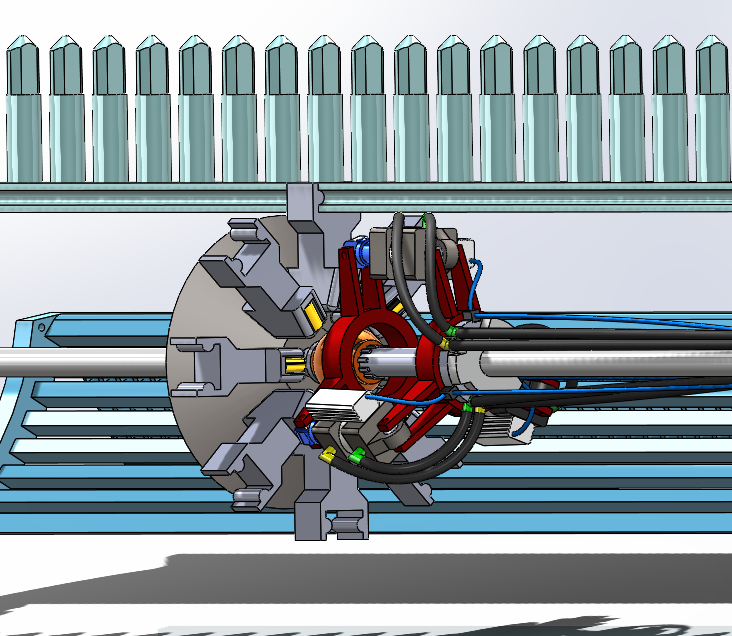
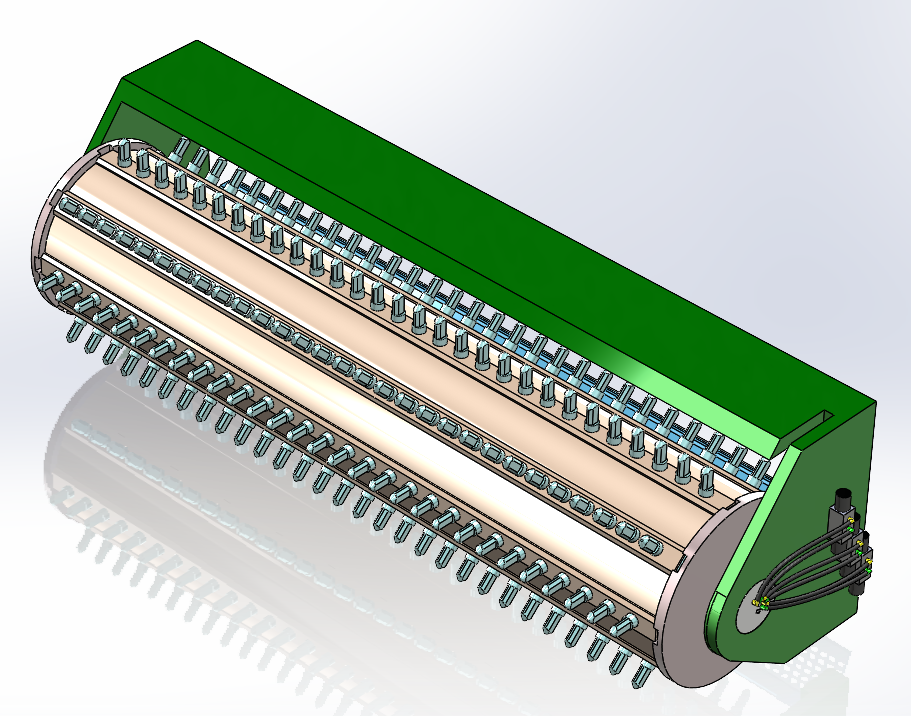
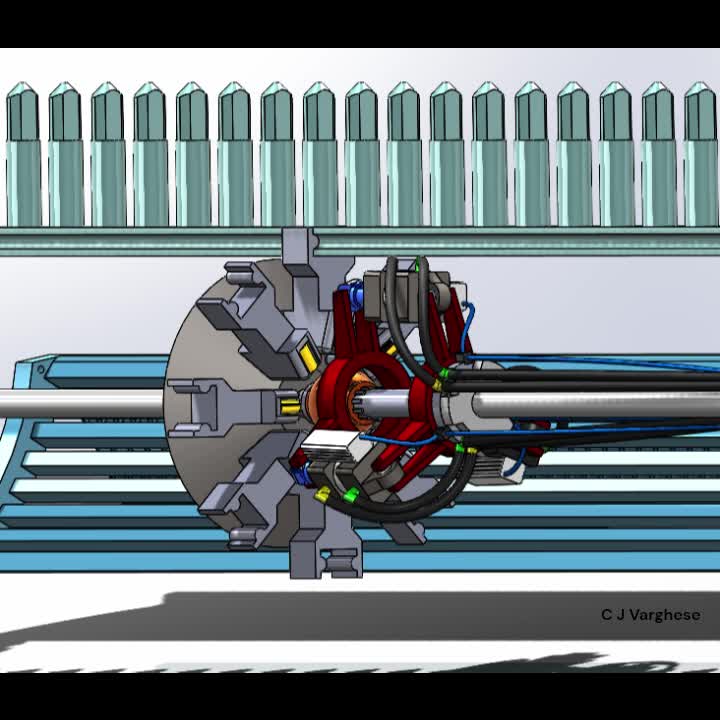
Kinematics/Motion Analysis study on Solidworks
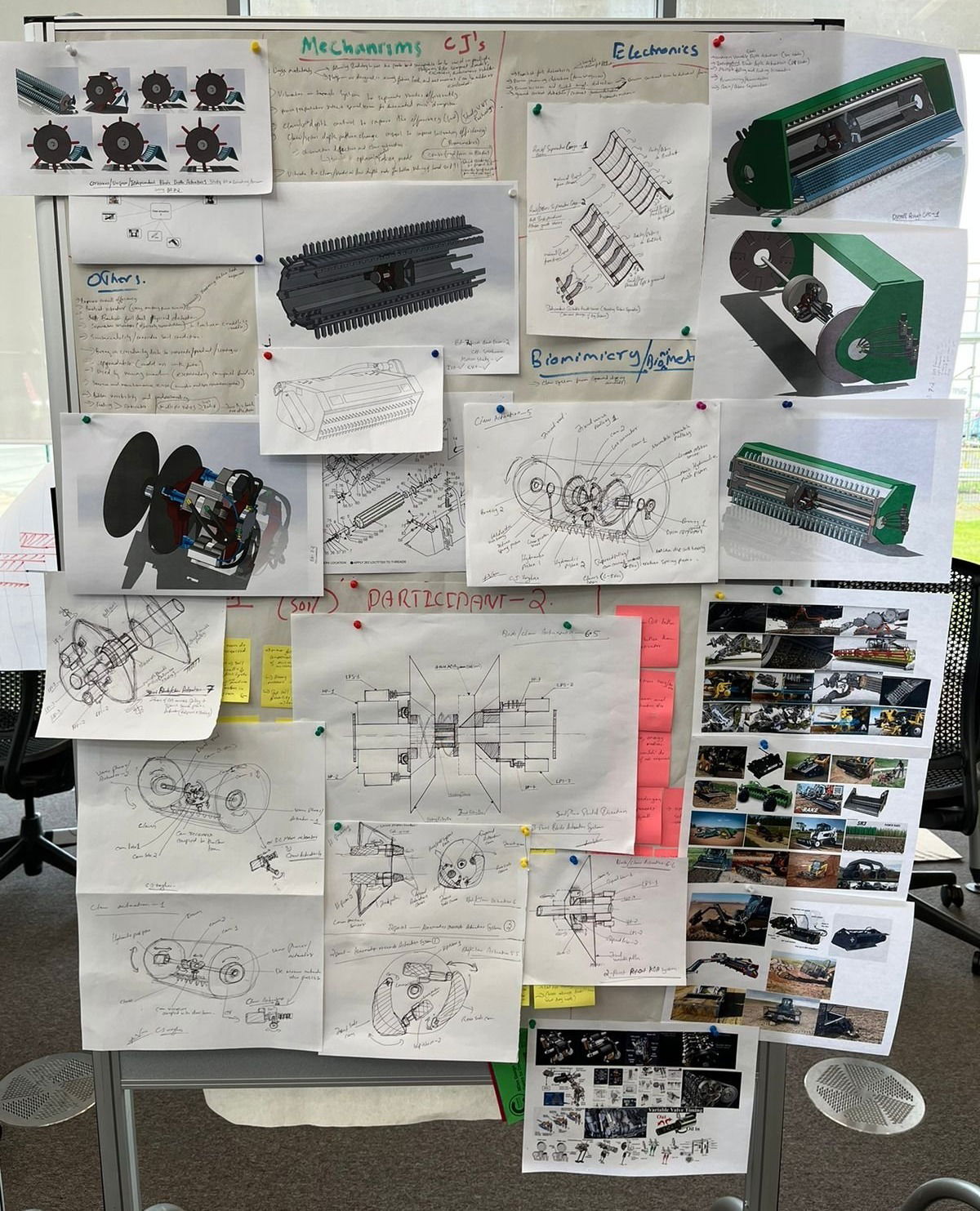
Ideation board: sketching, ideation and for general discussions